Differential
Differential—Preload
and Ramp Angle

Intro:
When writing
about race car dynamics, I often comment that the most mis-understood aspect of
setup is front caster settings. In the
FR2.0, the caster is fixed, so it is not an issue.
But, for this
car the most mis-understood setting is probably the Differential.
Race cars generally use one of four basic types of differentials:
1--Open
2—Spool or
Locked
3--Limited Slip
4--Locker
The Open
differential was developed to allow the tires on each side R-L to turn
different speeds—helpful when turning. Torque is applied equally to both tires,
with the torque applied being determined by the tire with the LEAST traction.
The Spool
differential is essentially where the tires on each side are locked and always
turn at the same speed. Same torque applied to both tires.
The Limited
Slip differential is an Open differential with a mechanism that allows to act
like a Spool differential, up to a limit, afterwhich the tires on each side R-L
may turn at different speeds.
The Locker is
a special device that acts like an Open differential when “coasting” or
decelerating and a Spool when accelerating. (e.g. Detroit Locker)
The FR2.0 uses
a Limited Slip Differential.
The following
Youtube video’s are quite informative.

The above
drawings illustrates the Ramp Angles very well.
Often it is confusing that a lower Ramp Angle produces more locking and
a higher Ramp Angle produces less locking, but from the video and the drawings,
you will see that the lower angle is essentially a “sharper” wedge that
produces more sideward force against the clutches.
The
Diff Preload is created by springs that push against the clutches all the time.
The
Ramp Angle creates additional force against the clutches during “coast” and “acceleration”.
The more
force applied to the clutches, the more locking force===the more the
differential acts like a Spool.
The less
force applied to the clutches the less locking force==the more the differential
acts like an Open Differential.
The following
link will take you to an excellent writeup by a group of Sim Racers in Denmark
where I found the drawing.
http://www.intothered.dk/simracing/differential.html
http://www.intothered.dk/simracing/differential.html
Another link
that you will find useful was written by my friend, Craig Taylor at Taylor Race
Engineering in Plano, Texas. Craig and I
raced against each other in SCCA FF1600 during the 1980’s. at Texas World
Speedway. He was really fast and like me, was an airplane pilot. He later went
on to win the US F2000 Championship.
Oversteer (Loose)
and Understeer (Push)
Determining
exactly how the car will react to changes in the differential is much more
complex than most people realize. So much is “going on” with the suspension,
brakes and steering, that the answer as to specific cause and effect of changes
in diff settings is: IT DEPENDS!
For those
interested, read the paper of research at GM over many years authored by Bundorf, who actually created a form of
analysis for studying dynamic understeer/oversteer. Bundorf Analysis where understeer is measured in units of degrees of additional yaw per g of lateral acceleration.
Following is the link.
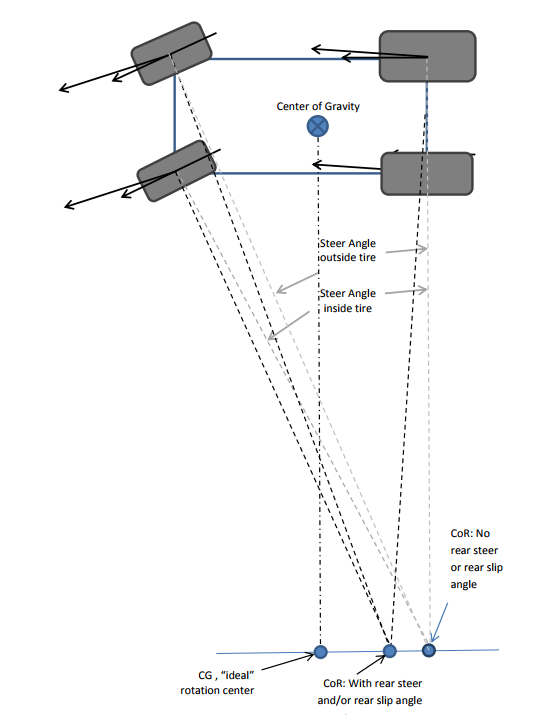
The above
illustration shows what the driver is sensing is changes in relative slip
angles on the front steering tires vs the rear powered tires. Here is the link to the entire article:
https://sweetmfg.biz/uploads/files/tech-04understandingsteering-4.pdf
Practical
OK, lots of
theory and engineering stuff. Let’s
again do some real world testing and practical info of how to make the IRacing FR2.0 go fast.
Here are the
screens for setting the Diff Preload and Diff Ramp angles. What many don’t realize is iRacing provides a HUGE range
of adjustment in Diff Preload from a low of -100 ft-lbs to a high of + 100
ft-lbs. That is a total range of 200 ft-lbs—theoretically in the amount of
torque that it would take to rotate one wheel while the other is stationary. (I assume -100 is zero and +100 is 200
ft-lbs total but I have no way of knowing that for sure. The most common settings I have seen for
Diff Preload is in the 0-25 range.)
For the Diff
Ramp Angle, there are only two choices: “70 coast/65 drive” and “65 coast/70
drive”.
The 65 is the
angle of “wedge” mentioned earlier and provides more locking force. So, generally, unless you love driving karts
with Spool-like solid axles where you throw or wrestle the car into the corners, generally “70 coast/65 drive” will produce the
best handling car as it will have less locking and understeer during Corner
Entry and Mid Corner. (Mid Corner understeer is generally not fast.)

Minimum
Locking= -100

Maximum
Locking = +100

“Typical”
Locking = +10
To determine
the effect of changes, I tested the car at all three of these setting examples
at several tracks. Actual engineering data was hard to collect, so here is some
“anecdotal” evidence. Try it for
yourself.
In T1 at
Silverstone, with Minimum Locking, I got a lot of trailing throttle oversteer
on corner entry—the car felt a lot like a Pro Mazda with an Open Diff. My
steering input was quite low at the apex. The feeling of oversteer disappeared
as I tracked out and the car felt a bit “understeery” on Corner Exit.
In the last hairpin
at Sonoma, the car with Maximum Locking seemed to have a great deal of
understeer on Corner Entry and then felt a bit “oversteery” on exit.
Hmmm—Minimum Locking
a bit like an Open Diff—like the Pro Mazda. Maximum Locking a bit like a
Spool---like a front engine GT3.
Keep in mind this
was testing at the extreme settings.
I really
wanted data, not “feelings”, so I tried the car at Milwaukee. A flat oval with big radius corners. Then at Martinsville—a
flat oval with relatively sharp corners.
Ahh! Eureka!!
See the
iSpeed Telemetry snapshot:

Here is a
link to the replay of the test at Martinsville in the FR2.0
More steering
input on Corner Entry and Mid Corner (A-B) would indicate understeer. Less steering input on Corner Exit (B-C)
would indicate oversteer or almost neutral. This is what I found.
The
more locking force (mostly from Diff Preload setting) the more the car pushed
or understeered in Corner Entry and Mid Corner. Lots more, like 20+ degrees
more steering angle required to maintain the same arc. Because of the
additional steering input at Mid Corner with more locking force, the car has a
bit more rotating momentum or inertia as it accelerates and hence needs less
steering on exit.

Keep
in mind that even with -100 Diff Preload, because of the 70 coast Ramp Angle,
there is still quite a bit of locking force on coast.
Discussion
A
Spool Diff works OK on a dirt oval. I have driven one in a Pro Dirt Legends Series in Central PA. It can be made to work on a paved oval.
But, it does not work very well on a road course. Why?
A
Spool resists the turning forces on a car and causes understeer, UNLESS, you
can adjust the tire size or “stagger” so that the inside and outside tires
rotate at different speeds, and unless you can adjust what is called the “bite” and “crossweight” as the car "rolls thru" Mid Corner and accelerates to Corner Exit. So on ovals, you can setup the car to
turn left better than it turns right. (An Asymetrical Setup for ovals.)
An
Open Diff does not resist the turning forces on a car. Most cars with an Open
Diff have some trailing throttle oversteer—not because of the differential, but
because of all the other setup parameters. The Open Diff simply does not offset
any of the ovesteering tendencies. (Although it does seem to have a bit of oversteer induced immediately as you lift the throttle and the diff sees engine braking resistance.)
Because
an Open Diff will stop delivering torque when the inside wheel loses traction,
it often tends to accelerate less powerfully off the corner. And, when trail braking,
it is easy to lock up the inside tire, which often produces snap oversteer.
A
Limited Slip differential is a hybrid, that acts a bit like an Open Diff and a
bit like a Spool. The Limited Slip Diff will introduce understeer during corner
entry, offsetting some or all of the trailing throttle oversteer tendencies. A
Limited Slip differential will allow much more trail braking than would be
possible with an Open Diff.
A Limited Slip differential does not have as
much corner exit understeer as would be evident with a Spool, and because at
the limit, it allows the tires to turn at different speeds, while still
transmitting torque, it will allow for significantly more corner exit
acceleration.
As
one realizes from driving IndyCar or F1, even a Limited Slip differential will
allow the car to be loose when applying power if traction is lost or even limited by the inside tire because of springs or ARB settings that are too stiff.
Also,
as oval track drivers know, there is a phenomenon known as Tight In/Loose Out
caused by driver input overcompensating for understeer at Mid Corner. Here the
driver enters more steering input at Mid Corner to make the car rotate, and
then the car becomes loose or oversteery on corner exit.
Finally,
the sharper the corner—the lesser the corner radius, the less locking you will
want. The larger the corner radius, the
more locking you will want.
My
advice
Set the Ramp Angle at “70 coast/65 drive” and forget it unless you
really love a lot of understeer on Corner Entry. Use the Diff Preload for “fine
tuning”.
Initially set up the Diff Preload somewhere in the -10 to +25
range depending on your preference for understeer during Corner Entry and the
amount of trail braking you prefer. The
higher the more understeer you will get, but the the more trail braking you can
use to get the car to rotate. This intial setting will be your “neutral” or “baseline”.
Experiment to determine your “preference” in this range.
Then, AFTER you think you have everything else (Downforce,
Springs, Dampers, ARB’s, Camber, Tire Pressure, Toe) just the way you want it,
go back and experiment to see if any changes improve your lap times.
One
final note. Keep in mind that iRacing provided the huge 200 ft-lb range in
Diff preload for a reason. They seldom provide a range that is completely irrelevant, so do
not be afraid to experiment with settings that you might not often see or have seen in the “shared
“ settings. I found the car surprisingly
drivable on many tracks with both extreme settings—I achieved identical lap
times at Milwaukee, Silverstone and Sonoma—by just adjusting my driving to the
car’s limits. When I set the preload at +100, I expected the car to "push like a snow plow" but it did not. On tracks with sharp corners, like Martinsville, the low Diff
settings allowed for significantly faster laps.
BTW--the little 210hp FR2.0 just about matched the XFinity car times at Martinsville!
NOTE: You will find that many drivers will run a much "stiffer" rear--with 900# springs and quite a bit of ARB. This makes the car quite "loose" or oversteery----so they offset this by increasing Diff Preload to 40+ and change ramp setting to 65coast/70 drive. These same drivers tend to run much less front brake bias.
My personal view is much of this driver preference has to do with how they trail brake. Normally, higher Diff Preload can be run with a heavy trail braking technique, but lower front brake bias makes trail braking more difficult. So this "stiffer" set up preference is generally a desire to rotate the car during corner entry without trail braking.
BTW--the little 210hp FR2.0 just about matched the XFinity car times at Martinsville!
NOTE: You will find that many drivers will run a much "stiffer" rear--with 900# springs and quite a bit of ARB. This makes the car quite "loose" or oversteery----so they offset this by increasing Diff Preload to 40+ and change ramp setting to 65coast/70 drive. These same drivers tend to run much less front brake bias.
My personal view is much of this driver preference has to do with how they trail brake. Normally, higher Diff Preload can be run with a heavy trail braking technique, but lower front brake bias makes trail braking more difficult. So this "stiffer" set up preference is generally a desire to rotate the car during corner entry without trail braking.